
ローリングシャシー – ニューモビリティ用プラットフォーム 明日の交通システムを築く新しいモビリティソリューション
Alexander Böhm | Dr. Manfred Kraus
電動化、自動運転、コネクティビティ、シェアリングサービスは、自動運転シャトルを活用した新しいモビリティのキーワードである。運行コストを低減して商用化を実現するため、シェフラーはMobileye(モービルアイ)社と提携して自動輸送ソリューションの開発を継続的に進めている。シェフラーはパワートレインからブレーキ、ステアバイワイヤシステム、そしてバッテリにいたるまで、すべての運転機能をモジュール化した「ローリングシャシー」を開発している。車両全体の設計や自動運転の実現を目指して各企業と連携し、ローリングシャシーをベースにした自動運転タクシー(ロボタクシー)から自動運転走行型デリバリー車両の開発に積極的に取り組んでいる。インテリジェントインフラストラクチャーシステムやコネクティビティオプションと組み合わせれば、総合的モビリティソリューションを実現することが可能である。
都市交通の発展
過去150年のモビリティの変遷を振り返ると、よく言われる「交通輸送の変革」が現代に限ったことではないことに気づく。19世紀末には早くも、交通にかかわる現代とは別種の環境問題からモビリティのシフトが起きた。多くの都市が、馬車が通った後に残された馬糞のなかで文字通り、息が詰まりそうになっていた。20世紀にはいると、馬を使わずに目的地まで行けて、都市を清潔に保つものとして自動車が市場に出た。その後、世界的に自動車が馬より優位に立ってきたことは言うまでもない(図1)。

現在の環境汚染に対しても、モビリティの根本的な技術革新が求められている。ドイツでは、道路交通がCO2総排出量の20%程度を占める[1]。内燃機関が馬に取って代わったように、クリーンな新技術が内燃機関に取って代わる日は近いだろう。しかし、この変化によって、今日のモビリティが抱える問題のすべてが解決されるわけではない。とくに都市部では、駐車場に必要な広大な土地が課題として残る。ドイツでは、自動車の駐車スペースはサッカー場なら27万ピッチ分の面積に相当する。交通事故の多さも問題である。世界中で年間130万人以上が交通事故で死亡している。また、交通渋滞は経済にダメージを与えるだけでなく、直接的・間接的に約800億ユーロの余分なコストを発生させる。
前記の問題は、単に電動モビリティに「乗り換える」だけでは解決できず、将来はより顕著になると予測される。国連の予測によれば、2050年には世界人口の68%が都市圏に住むようになる[2]。1950年には、この数字は30%にすぎなかった。世界の都市居住者数は、1950年には7億5,100万人だったものが、2018年には42億人へと急増している。2050年までには、さらに25億人が都市圏に居住するようになるとみられる。大都市の多くでは、自家用車の台数を減らし、代替交通手段の利用を促すなど、自動車の過密の緩和に向けさまざまな対策に乗り出している。パリはその一例で、いわゆる「15分シティ」に街を変容させようとしている。自宅から徒歩や自転車による15分以内の移動で基本的なニーズはすべて満たせる街をつくるという構想である(図2)。また、乗用車に報奨金/罰金の制度を設けたり、登録台数や駐車スペースを制限したりして乗用車の総台数の削減を計画している都市もある。

自動輸送システム
自動車業界も、コネクティビティ、電動化、自動運転、シェアリングサービスを連携させた新しいモビリティコンセプトを開発することで、こうした課題に取り組んでいる。シェフラーは、2018年に「Schaeffler Mover」(シェフラームーバー)コンセプトを発表した[3](図3)。シェフラームーバーは、大勢の人をすばやく快適に輸送し、環境に配慮した高効率の運転を実現する車両である。レベル4の自動運転(高度自動化)を設計コンセプトとしている。2020年にボストンコンサルティンググループとスイスのザンクト・ガレン大学が共同で実施した調査によれば、自動運転走行型ロボタクシーの導入による交通ミックスの変化によって、都市部CO2排出量を最低12%削減できる。また、自由に利用できるスペースが35%増加し、交通事故による死亡者数を37%も減らすことができるほか、交通渋滞も緩和されるとの調査結果が発表されている。

ドイツだけでも、すでに60件近くの自動運転走行型シャトルシステムのパイロットプロジェクトが進行中である。しかし、システムの実運用にいたるには、まだ多くのハードルがある。これまで、プロジェクトにとって大きな制約となっていたのは、危険な状況が発生した場合に車両を手動で制御する保安スタッフに関する同乗規則である。保安スタッフの同乗がなければ、システムの公道運行が法的に禁止されていたからである。2021年、ドイツでは自動運転走行に関する新たな法律が制定され、全国の所定区域内の公道で高度自動化車両を運行させるための法的枠組みが整備された[4]。このように、ドイツは自動運転走行システムで先駆的な役割を担っている。他国もまもなく追随するものとみられる。
法的なハードルに加えて、次の2つの大きな技術的制約もある。これは、パイロットプロジェクトにおいてシャトルシステムを運行させた事業者からのフィードバックで明らかになった。- パイロットプロジェクト車両は、走行距離が事前に測定されたルートで使用される。さらに、車両はコンピュータで走行軌道の目標値と実測値を比較したり、磁気ストリップを利用したりして制御されている。つまり、車両は「バーチャルトラック(仮想コース)」を走行する。そのため、たとえば路肩に駐車している車両を避けるために必要な走行軌道の変更に対応できない。このような場合は、安全のために電子機器が車両を停止させることになる。
- 完全自動運転走行車は、まだ使用範囲を限定して設計されることが多く、時速25 km程度の低速走行しか許可されていない。また、ABSなどの重要なアクティブセーフティシステムや、十分な冗長性をもつ制御システムも搭載されていない。
新しいモビリティ形態の開発戦略
図4は、新モビリティ形態に関するシェフラーの開発戦略を示す。開発戦略の基礎は、ドライブトレインやステアリングシステムの製品イノベーションによって強固なものとなる。これを実現するために、シェフラーではパワートレインからブレーキ、ステアバイワイヤシステム、バッテリにいたるまで運転機能をモジュール化した「ローリングシャシー」を開発している。先進ドライブバイワイヤ技術により、公道での安全運行が可能となる。シェフラーでは、車両全体の設計や自動運転の実現などを目的とした各企業との提携を最大限生かし、自社開発ローリングシャシーをベースにロボタクシーから自動運転走行型デリバリー車両までの実現に取り組んでいる。インテリジェント・インフラストラクチャーシステムやコネクティビティオプションと組み合わせれば、公共・民間セクタにサービスを提供するモビリティサービスプロバイダとして総合モビリティソリューションを提供することも可能である。

図4に示した開発ピラミッドの各コンポーネントについて、以下で詳しく解説する。シェフラーのドライブトレイン、ステアリングシステム製品をはじめとして、それらの統合、そして個別システムを機能的に組み合わせて構成するローリングシャシーにいたるシステムである。
インホイールモータ
現在シェフラーで開発中のインホイールモータは、主としてステータとロータのモータ部品、減速機、一体型ブレーキシステムで構成される(図5)。インバータは一体化されていないが、多様な方法で車両に搭載可能である。1つのインバータで用途に応じて1~2個のインホイールモータを制御する。モータ駆動力はサイズに比例し、モジュールとして調整できる。モータの出力レンジは7~26 kW(公称)で、短時間であれば最大出力14~60 kWまで対応可能である。定格駆動トルクは、730 Nm(公称)と1,650 Nm(最大)である。ここで重要なのはホイールのトルク密度である。全ドライブが14インチリムに組み込まれている。トルク密度はリム1インチあたり118 Nm程度になる。高出力に伴う冷却の必要性から、インホイールモータには液体冷却システムが装備されている。外気との熱交換は、車両に個別に設置された1つまたは複数の冷却器で行う。シェフラーは、48Vと400Vの電圧に対応したインホイールモータを開発している。将来はさらに高電圧のものも想定される。インホイールモータは、2023年に量産開始予定である。

電動アクスル
ローリングシャシーには、インホイールモータの代替装置として電動アクスルを搭載できる(図6)。この場合、電動モータは両ホイール間に配置され、動力はドライブシャフトを介して機械的にホイールに伝達される。シェフラーのソリューションの特長は、平歯車ディファレンシャルを用いた設計にある。これにより、ドライブシャフトをモータのロータ軸と同心軸に配置でき、省スペース化を実現している。新モビリティコンセプトに使用されるシェフラーの電動アクスルはすべて、パワーエレクトロニクスと液体冷却システムを内蔵している。出力レンジは、50~500 kW(公称)または2,000~8,000 kW(最大)である。シェフラーはすでに2018年から電動アクスルの量産を開始しており、2027年までに年間数百万台の生産規模に達する予定である。シェフラーの電動アクスルに関する詳細は、文献[5]で紹介されている。

バイワイヤステアリングシステム
無人の電子制御車両には、ステアリング操作をステアリングコラムとステアリングホイールによる機械的伝達ではなく、電子的に伝達するステアバイワイヤシステムとの相性が良い。高性能で安全なモジュールシステム実現のため、シェフラーは綿密なイノベーション計画を立案し、部品レベルではメカトロニック・リアアクスルステアリング(インテリジェント・リアホイールステアリング、iRWS)およびパワーパックの開発を推進してきた(図7)[6]。開発には、Schaeffler の「Space Drive」ステアバイワイヤシステムの実装で獲得した豊富な知見が盛り込まれている。パワーパックは、ステアリング力を提供する電動モータと、関連パワーエレクトロニクスで構成される。ローリングシャシーに使用する場合は、モータを1つまたは複数のスパーギア段と組み合わせることで、要求速度とステアリングトルクにシステムを最適化させる。これらのドライブは、12Vまたは24Vの電源電圧に対応し、最大880 Wの定格出力を提供する。
採用されているパワーエレクトロニクスは、電源とロジックで適切な冗長レベルを維持しステアバイワイヤシステム使用時の機能安全要件を満たす。たとえば、電動モータは故障発生時の安全保護のため、ダブルワインディング運転が可能である。シェフラーのパワーパック設計は、プロジェクトパートナーが共同でローリングシャシーの開発を行うときに、自社の機械式ステアリング部品と組み合わせることができる。シェフラーのモジュール式ステアリングシステムは、自動運転走行型シャトルシステムに柔軟に対応する。

シェフラー「Corner Module」
ローリングシャシー用に特別に開発されたシェフラー「Corner Module」は、ホイールサスペンションとその部品で構成される。電気機械式ステアリングシステム用のアクチュエータやインホイールモータも一体化が可能である。インホイールモータを使用すれば、従来のドライブシャフトは不要となり、車両スペースをより効率的に活用して輸送能力の向上につながる。Corner Moduleのステアリング角度は−90度から+45度と際立っており、狭い街路の走行時でも車両を楽に操縦できる。インホイールモータを組み込んだCorner Moduleを4台搭載すれば、「真横移動による縦列駐車」や「その場旋回」も可能である。

ローリングシャシーの集中制御
一体化方式「Corner Module」の発展形式が、4つのモジュールを体系的に組み合わせたローリングシャシーである。4つのCorner Moduleは、集中制御装置であるシャシー制御装置(CCU)で相互調整される(図9)。CCUは、車両の縦・横方向の動きを制御する上位レベル制御コマンドをCorner Module制御信号に変換し、ホイールごとにステアリング、ブレーキ、駆動アクチュエータを制御する。個別モジュールおよび車両制御装置(VCU)との通信は、CANバスまたはCAN-FD(フレキシブルデータ速度CAN)を介して2チャンネルで行う。ローリングシャシーは、インホイールモータとステアリングアクチュエータを一体化したCorner Moduleのほか、電動アクスルと車両中央にステアリングを配置した駆動トポロジーも可能である(図10)。


シェフラーはCCU開発にあたり、多数の顧客の要望を反映させている。顧客固有の車両アーキテクチャへの統合を用意にするためには、ローリングシャシーへの集中インタフェースが重要であり、多くのフィードバックや実装例からも明らかである。
シェフラーは、CCUアーキテクチャ開発において10年以上の現場経験と10億kmを超える走行実績で培った「Space Drive」技術の知識を活用した。これは、ローリングシャシーの安全コンセプト設計にも積極的に活かされている。冗長制御アーキテクチャとアクチュエータの物理的冗長性により、ブレーキ機能とステアリング機能の動作不全が防止できる。故障発生時にもシステムは作動し続けることから、この方式は「フェールオペレーショナル」と呼ばれる。機能レベルで発生した故障は、第2レベルのアクチュエータで対応できる。たとえば、1個所または2個所の「Corner Module」でステアリングシステムの故障が発生した場合、正常機能しているモジュールを操作しながら制動し、車両が緊急停止するまでの安全動作を確保する。この冗長化手法はCCUでも踏襲されており、万一故障が発生してもアクチュエータを安全に制御することができる。
モジュール方式とスケーラビリティ
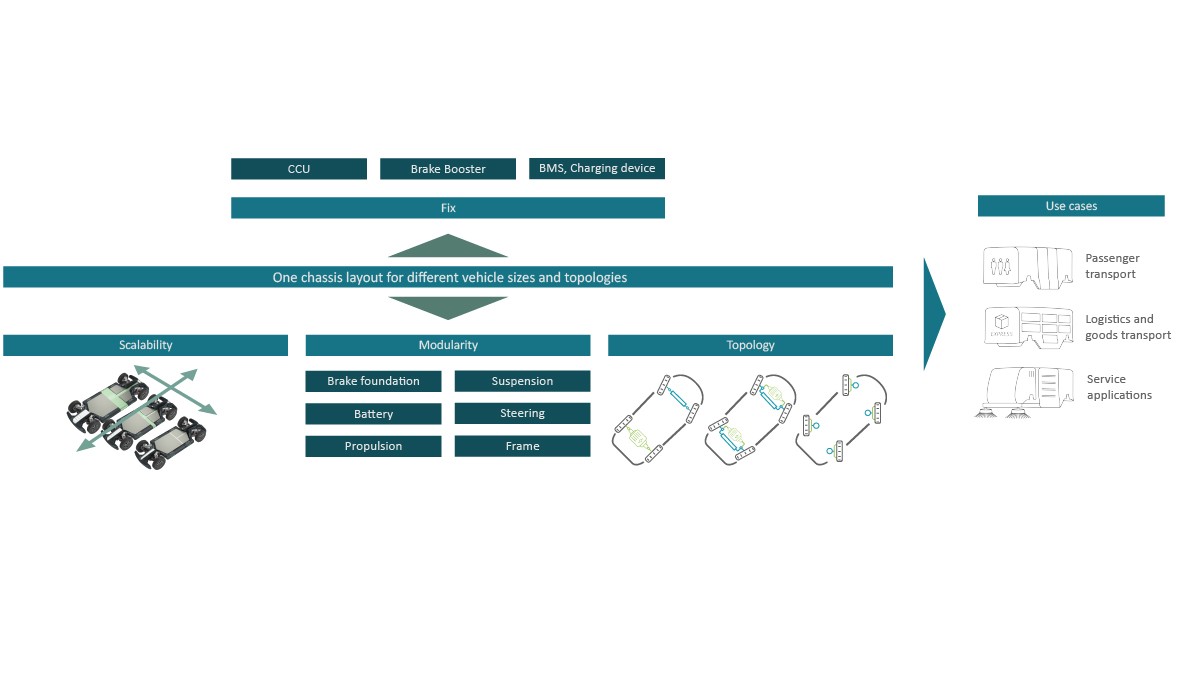
ローリングシャシー制御システムをソフトウェアとハードウェアに実装する際、シェフラーはモジュール設計とすることに重点を置いた。ローリングシャシー顧客に最適な柔軟性をもたらす方式と考えるからだ。CCU、ブレーキアクチュエータ、バッテリマネジメントシステム、バッテリ充電システムを装備し、異なる駆動コンセプトから選択できるだけでなく、必要に応じて他の車両パラメータを特定要件に適合させることもできる(図11)。モジュール設計は、車体フレーム、バッテリ、ブレーキシステム、ステアリングシステム、ホイールサスペンションに採用されている。
重要コンポーネントのモジュール化が、車両スケーラビリティを確保するための基礎となる。使用可能な広範な車両トポロジーの創出が可能となる。繁華街での人員輸送を容易にする車両や、重量物の長距離輸送車両などである。「Corner Module」は、車両の長さと幅を簡単に変更でき、優れた柔軟性を提供する。
- 用途(旅客輸送のためのロボタクシー、ロボシャトル、貨物輸送のための運搬車)
- 用途環境 [都市部、都市間(都市+地方)、工場敷地]、選択可能な車両サイズの制限
- 車両サイズとバッテリ容量の選択(走行サイクルや使用環境に基づく車両質量に対する航続距離の計算)
- 「Corner Module」の選択(回転半径、その場旋回や斜行など特殊操作に対する適性)

車両プラットフォーム
シェフラーが現在開発中のローリングシャシーのドライブトレインの一つは電動アクスルである。諸元を図13に示す。シェフラーは、高度自動運転分野での専門性向上のため、Mobileye(モービルアイ)社との共同事業も進めている。同社は、視覚センサと機械学習、データ解析、ローカライゼーション、マッピングの技術開発において世界のトップ企業である。これらはすべて、ドライバーアシストシステムや自動運転走行ソリューションに活用される技術である。総合的車両機能を実現するため、ローリングシャシーにはコンパートメントを設置し、自動化機能に必要なセンサを装備する。シャトルの座席数は12席、乗客の立乗りスペースもある。地域公共交通機関(LPT)としては十分なキャパシティである。また、10名の乗客と車椅子の乗客1名を乗せることも可能である。車椅子用スロープが自動的に伸展して、アクセスのバリアフリー化に対応している。バッテリ充電を効率的に行うため、自動導電性充電方式を採用した。駐車すると、コネクタがフロアに埋め込んだ充電パッドの上に降りてきて、導体の電気的接触によって充電が行われる。物理的な直接接続によって電気が最小限のロスで伝達されるので、インダクティブ(電磁誘導)充電方式などと比較して充電時間を最短化することができる。

ロボシャトルのエコシステム
コンセプトとしてみれば、無人輸送システム運用には幅広いエコシステムが必要となる。設計と開発には、大きなイノベーションの可能性がある。バッテリ充電や車両メンテナンスの個別車両関連サービスのほか、フリート(車両群)管理も含まれる。顧客インタフェースの観点からみれば、スマートフォンの新しい決済アプリを用いて車両を利用できるように設計することも可能である。マルチモード設計を採用し、「モビリティサービス」として既存システムと統合し、交通機関間のスムーズな乗り換えを実現することが理想である。シェフラーは現在、とくに地方の運輸会社など小規模事業者向けのロボシャトルソリューションをターンキーベースで提供するため、関連エコシステムを開発・運用するためのパートナーを求めている。充電インフラに関しては、重くて厄介な充電ケーブルを扱わなくて済むように、前述の導電性充電方式に取り組んでいる。シャトルは充電ステーションまで完全に自動運転走行して充電できるので、充電時の手作業は不要となる。
まとめ
大都市の多くでは、流入する車両を最小限に抑え、代替交通手段の利用を促すなど、自動車の過密の緩和に向け、さまざまな対策に乗り出している。自動車業界もこうした問題の解決に向けた動きを加速しており、ネットワークとの接続性(コネクティビティ)や電動化、自動運転、シェアリングサービスなどをキーワードに新しいモビリティソリューションの開発に取り組んでいる。シェフラーは、すでに数年前に「シェフラームーバー」というソリューションを提案している。この交通システムではレベル4の自動運転(高度自動化)を利用する。Mobileye (モービルアイ)社との提携と協力のもと、開発を継続的に進めている。目標とするのは、高度自動運転シャトルの運行コスト低減を図り、商用化に向けた準備を加速することである。これを実現するために、シェフラーではパワートレインからブレーキ、ステアバイワイヤシステム、そしてバッテリにいたるまで、すべての運転機能をモジュール化した「ローリングシャシー」を開発している。要求される出力条件などに合わせ、車両の駆動方式はインホイールモータまたは電動アクスルを選択することが可能である。安全で信頼性の高いステアバイワイヤシステムをローリングシャシーに実装するため、シェフラーは完全なシステムアセンブリとしてのメカトロニックリアアクスルステアリングシステムと、パワーパックとも呼ばれる個別モータエレクトロニクスユニットを開発している。ローリングシャシーのサスペンションは、コンパクト設計のシェフラー「Corner Module」の中に組み込まれている。この「Corner Module」にはステアリングアクチュエータとインホイールモータも組み込まれており、顧客の要求に合わせた柔軟な設計が可能である。
シェフラーでは、車両全体の設計や自動運転の実現などを目的とした各企業との提携を最大限生かすことで、自社開発のローリングシャシーをベースに自動運転タクシー(ロボタクシー)から自動運転走行型デリバリー車両まで、乗用車や貨物輸送車を1台の車両として実現してゆくことが可能である。インテリジェントインフラストラクチャーシステムやコネクティビティオプションと組み合わせれば、公共・民間セクタにサービスを提供するモビリティサービスプロバイダとして総合モビリティソリューションを提供することも可能である。シェフラーは、近い将来、路上を走行する車両の10台に1台が自動輸送システムになるものと予測している。自動運転シャトル(ロボシャトル)が従来の乗用車に取って代わるわけではなく、一般市民が利用できるモビリティの選択肢が増えるのである。
[1] Presse- und Informationsamt der Bundesregierung (pub.): Verkehr umweltfreundlich machen. https://www.bundesregierung.de/breg-de/themen/klimaschutz/klimaschonender-verkehr-1794672, retrieved 22 February 2022
[2] Deutsche Stiftung Weltbevölkerung (Hrsg.): Im Jahr 2050 werden zwei Drittel der Weltbevölkerung in Städten leben. https://www.presseportal.de/pm/24571/3945595, retrieved 17 January 2022
[3] The Schaeffler Mover. In: ATZextra "Innovationen für eine nachhaltige und autonome Mobilität", 2019
[4] Bundesministerium für Digitales und Verkehr (Hrsg.): Gesetz zum autonomen Fahren tritt in Kraft. https://www.bmvi.de/SharedDocs/DE/Artikel/DG/gesetz-zum-autonomen-fahren.html, retrieved 11 March 2022
[5] Homm, M.: Fascination Electric Powertrain. Bühl: Schaeffler-Kolloquium, 2022
[6] Feltz, C. et al.: Chassis Systems ─ Heading Toward Steer-By-Wire. Bühl: Schaeffler Kolloquium, 2022